因為專業
所以領先
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)
因為專業
所以領先

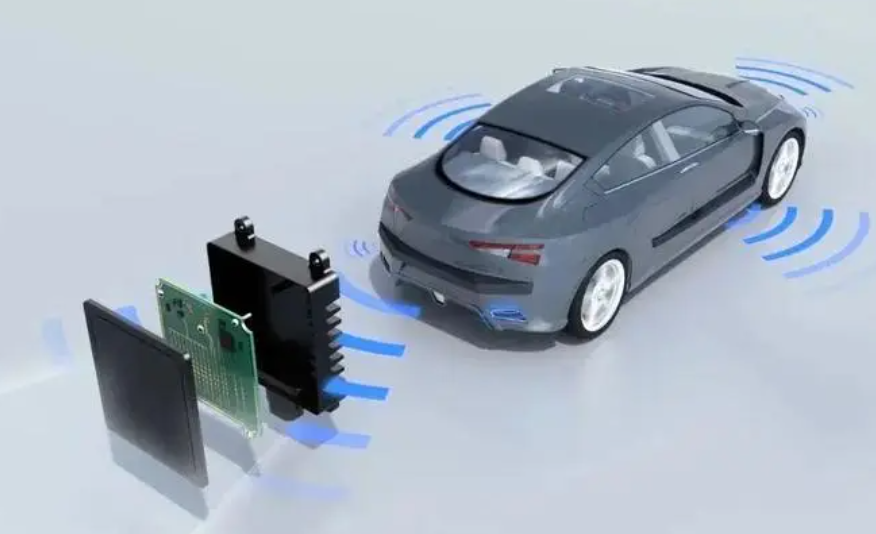
毫米波雷達本質是利用電磁波信號被其發射路徑上的物體阻擋繼而會發生反射。通過捕捉反射信號,來確定物體的距離、速度和角度。其波長范圍為 1~10mm,頻率范圍為 30~300GHz。按工作方式來看,毫米波雷達分為脈沖類型和連續波類型,連續波類型又細分為 CW(恒頻連續波,只能測速不能測距)、FSK(頻移鍵控連續波、可探測單個目標的具體和速度)、FMCW(調頻連續波,可對多個目標實現測距和測速,分辨率高,技術成熟)。
脈沖雷達工作原理:脈沖工作方式可以將發射波和回波區分出來,同時可對比接收回波與發射信號中不同頻率,利用多普勒效應得到目標的速度信息。也可以利用回波的時間信息得到距離信息。該方式數據處理原理較簡單,但由于單次脈沖需求功率大,存在間歇期的盲區,在當前毫米波雷達產品中未被采用。
CW 恒頻連續波雷達工作原理:對接收信號與發射信號的混頻可以得到目標的多普勒頻率進而得到速度信息。但是由于是連續波,不能測得發射信號的來回時間。因此 CW 雷達不能進行距離測量,只能實現對目標的速度測量。
FMCW 雷達工作原理:FMCW 雷達的發射頻率隨時間變化呈線性變化,這樣在發射信號里面可攜帶時間信息。高頻信號由壓控振蕩器產生,通過功率分配器將一部分經過額外放大后饋送至發射天線,另一部分耦合至混頻器,與接收的回波混頻后低通濾波,得到基帶差頻信號,經過模數轉換后送至信號處理器處理。這樣得到的信號既能得到時間信息,也可以得到多普勒效應特征點。因此可同時測量速度和距離信息。
優點:具有穿透力強(不受煙、霧、灰塵影響)、可全天候使用、性能穩定等特點。 缺點:無法提供高度信息,空間分辨率一般,對于靜態目標易產生漏檢的情況,導致自動駕駛系統做出錯誤的決策。另外由于毫米波雷達芯片基本被博世、NXP、TI 壟斷,其中博世和 NXP 又不對外供貨,導致國內企業基本用的是 TI 的芯片,這也導致同質化競爭特別嚴重,另外在 PCB 基材以及結構布局對雷達性能很敏感,基本上這一塊也受國外企業壟斷,比如羅杰斯等。
前向 MRR 和 LRR 往高頻率 77/79GHz 方向演化。
毫米波雷達對方位的探測,利用的是波長短的特性,使用陣列天線來構成窄波束。實現一個雷達覆蓋較寬的方位角。
提高雷達頻率,在保持相同增益的條件下,天線孔徑可隨波長的平方倍數減少。對應雷達尺寸也可降低。
同時孔徑減小可提供更窄的波束,雷達的速度,位移,物體尺寸的探測精度可大幅度提高。
毫米波雷達在汽車上的應用主要是通過電磁波束對于目標進行探測。但毫米波雷達發射功率、探測距離以及天線排布、探測角度之間互相制約。因此汽車領域的毫米波雷達被分為了三類:遠距 LRR、中距 MRR、近距 SRR。SRR 目前價格大約 45 - 60 美元一只,MRR 大約 45 美元,LRR 大約 80 - 90 美元。車載雷達的頻率主要分為 24GHz 頻段和 77GHz 頻段,其中 77gHz 頻段代表著未來的趨勢:這是國際電信聯盟專門劃分給車用雷達的頻段。嚴格來說 77GHz 的雷達才屬于毫米波雷達,但是實際上 24GHz 的雷達也被稱為毫米波雷達。長距離與中距離毫米波雷達都是 77GHz,短距離是 24GHz。其中,77GHz 毫米波雷達主要用在車的正前方,用于對中遠距離物體的探測,24GHz 毫米波雷達一般被安裝在車側方和后方,用于盲點檢測,輔助停車系統等。目前的主流自動駕駛車型中,通常 L2 級別配備 3 個 24GHz 和 1 個 77/79GHz 毫米波雷達,L3/L4 級別車一般配備 4 - 6 個 24GHz 和 2 - 4 個 77/79GHz 毫米波雷達。完全實現 ADAS 各項功能一般需要“1 長+4 中短”5 個毫米波雷達。奧迪 A8 搭載 5 個毫米波雷達(1LRR + 4MRR),奔馳 S 級搭載 6 個毫米波雷達(1LRR + 6SRR)。雷達通過天線向外發射毫米波,接收目標反射信號,經后方處理快速準確地獲取汽車周圍的物理環境信息(如汽車與其他物體之間的相對距離、相對速度、角度、運動方向等),然后根據所探知的物體信息進行目標追蹤和識別分類,進而結合車身動態信息進行數據融合,最終通過 ECU 進行智能處理。經合理決策后,以聲、光及觸覺等多種方式告知或警告駕駛員,或及時對汽車做出主動干預,從而保證駕駛過程的安全性和舒適性,減少事故發生幾率。

因為有發送和接收信號兩部分,信號也是主要從兩個部分來走的,一個是接收天線,通過 LNA 信號放到器,再到混頻器,最終進入 DSP 的信號進行 AD 采樣,然后進行低通濾波,最終傅里葉變換進入 MCU。發送信號類似的原理,調制方式這里需要重點注意一下,90%的毫米波雷達都是選擇 FMCW 調制方式。FMCW 是主流的毫米波雷達工作方式。根據輻射電磁波方式不同,毫米波雷達主要有脈沖體制以及連續波體制兩種工作體制。毫米波雷達芯片正在逐步走向集成。一個在 76 - 81 千兆赫(對應波長約 4 毫米)工作的毫米波系統,將有能力探測到小于一毫米的移動系統組件的尺寸,也就是相當于要識別出來一個硬幣大小尺寸的物體。完整的毫米波雷達系統包括發射(TX)和接收(RX)射頻(RF)組件;模擬元件,如時鐘、模擬 - 數字轉換器(ADC);微控制器(MCUs)和數字信號處理器(dsp)等數字組件。
毫米波雷達天線設計包括 2 部分:天線陣元設計和天線陣列的布局設計。目前車載毫米波雷達天線陣元主要包括 4 種:
| 天線類型 | 特點 |
|---|---|
| 串狀天線 | 陣元設計簡單,天線增益更大一些,多個天線陣元之間一致性設計起來更容易。 |
| 梳狀天線 | 增益相對串狀天線增益較小,陣元天線增益方向圖不像串狀天線的那么平滑,陣元間不一致性差一點。博世和大陸的雷達通常使用樹狀天線。 |
| SIW 縫隙天線 | 輻射效率比微帶線天線高,但缺點是加工要求較高,成本較高,安波福雷達使用這種天線。 |
| 波導腔體天線 | 在多片級聯的 4D 雷達應用中有很多優勢,缺點是加工精度要求很高,成本非常高,但是是未來的發展方向。 |
天線陣列布局方面,在收發通道數比較少的情況下,為了增大天線陣列孔徑,最小冗余陣列是常用的設計方法。
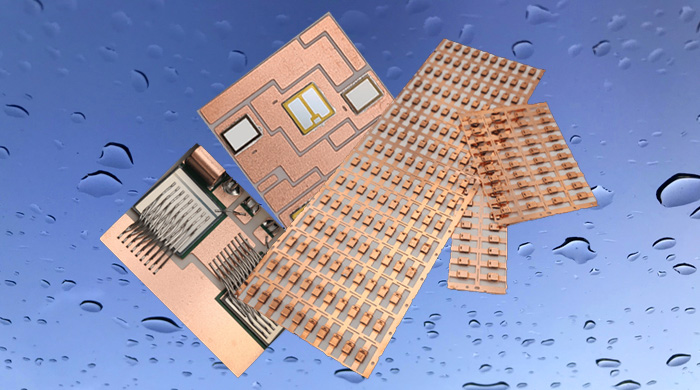
傳感器芯片封裝清洗:
合明科技研發的水基清洗劑配合合適的清洗工藝能為芯片封裝前提供潔凈的界面條件。
水基清洗的工藝和設備配置選擇對清洗精密器件尤其重要,一旦選定,就會作為一個長期的使用和運行方式。水基清洗劑必須滿足清洗、漂洗、干燥的全工藝流程。
污染物有多種,可歸納為離子型和非離子型兩大類。離子型污染物接觸到環境中的濕氣,通電后發生電化學遷移,形成樹枝狀結構體,造成低電阻通路,破壞了電路板功能。非離子型污染物可穿透PC B 的絕緣層,在PCB板表層下生長枝晶。除了離子型和非離子型污染物,還有粒狀污染物,例如焊料球、焊料槽內的浮點、灰塵、塵埃等,這些污染物會導致焊點質量降低、焊接時焊點拉尖、產生氣孔、短路等等多種不良現象。
這么多污染物,到底哪些才是最備受關注的呢?助焊劑或錫膏普遍應用于回流焊和波峰焊工藝中,它們主要由溶劑、潤濕劑、樹脂、緩蝕劑和活化劑等多種成分,焊后必然存在熱改性生成物,這些物質在所有污染物中的占據主導,從產品失效情況來而言,焊后殘余物是影響產品質量最主要的影響因素,離子型殘留物易引起電遷移使絕緣電阻下降,松香樹脂殘留物易吸附灰塵或雜質引發接觸電阻增大,嚴重者導致開路失效,因此焊后必須進行嚴格的清洗,才能保障電路板的質量。
合明科技運用自身原創的產品技術,滿足芯片封裝工藝制程清洗的高難度技術要求,打破國外廠商在行業中的壟斷地位,為芯片封裝材料全面國產自主提供強有力的支持。
推薦使用合明科技水基清洗劑產品。
![[x]](/template/default/picture/closeimgfz1.svg)





![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](/template/default/image/zixuniconim1.png)
![[x]](/template/default/image/closeicon1.png)

![[圖標]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)