因為專業
所以領先
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)
因為專業
所以領先

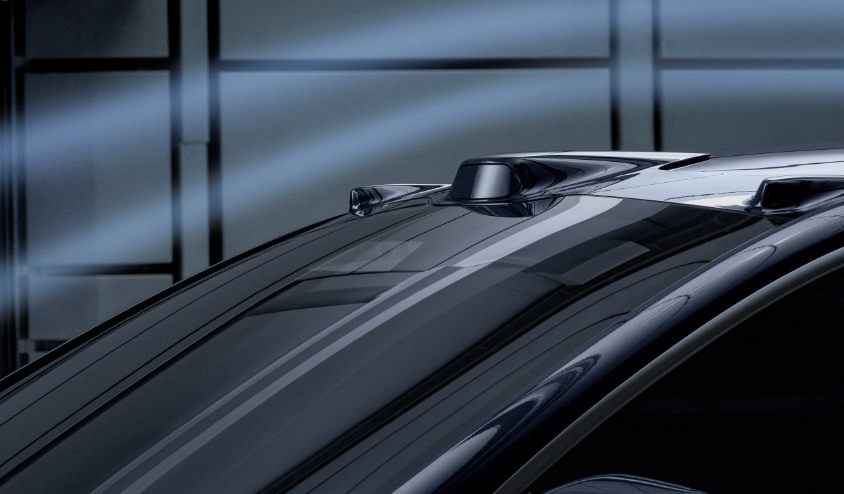
自動駕駛技術的發展離不開各種傳感器的輔助,這些傳感器相當于汽車的“感官”,使車輛能夠感知周圍環境并做出相應的決策。自動駕駛汽車通常需要集成多種類型的傳感器來實現全方位的環境感知,包括定位、障礙物檢測、道路識別等功能。

車載攝像頭是自動駕駛系統中應用最廣泛的傳感器之一,主要負責捕捉車輛周圍的視覺信息。根據安裝位置和功能,車載攝像頭可以分為前視、側視、后視和環視等類型。前視攝像頭通常用于車道保持、交通標志識別等功能,而環視攝像頭則用于全景監控和輔助泊車。攝像頭的優勢在于能夠識別豐富的環境信息和紋理,但同時也容易受到光照變化和惡劣天氣的影響。
毫米波雷達通過發射和接收電磁波來測量與周圍物體的距離和相對速度。它具有體積小、安裝方便、抗干擾能力強等優點,適用于中短距離的障礙物檢測和自適應巡航控制。毫米波雷達分為24GHz和77GHz兩個頻段,77GHz雷達因其高分辨率和精確度而更受青睞,但成本相對較高。

激光雷達(LiDAR)是一種利用激光進行高精度測距和三維環境映射的傳感器。它通過發射激光束并接收反射回來的光線來獲取周圍環境的精確三維信息。激光雷達的優點是精度高、分辨率好,能夠提供豐富的環境細節,但價格昂貴且受環境因素影響較大。隨著技術的發展,激光雷達的成本正在逐漸降低,應用范圍也在不斷擴大。
超聲波雷達主要用于近距離目標檢測,如自動泊車輔助系統。它通過發射超聲波并接收反射回來的聲波來測量與障礙物的距離。超聲波雷達的優點是成本低廉、安裝簡便,但在高速行駛或長距離探測方面存在局限性。
全球導航衛星系統(GNSS)和慣性測量單元(IMU)通常結合使用,為自動駕駛汽車提供精確的定位和導航信息。GNSS通過接收衛星信號來確定車輛的全球位置,而IMU則通過測量車輛的加速度和角速度來輔助定位和導航。這兩種傳感器在自動駕駛系統中起到至關重要的作用,尤其是在城市峽谷或隧道等GNSS信號受限的環境中。
夜視系統利用紅外線傳感器在低光照環境下提供清晰的圖像,幫助自動駕駛汽車在夜間或能見度低的情況下安全行駛。夜視系統可以檢測到行人、動物或其他車輛,并提前預警,以避免潛在的碰撞風險。
自動駕駛傳感器的性能和應用場景是選擇傳感器時的重要考慮因素。每種傳感器都有其獨特的優勢和局限性,自動駕駛系統通常需要集成多種傳感器以實現更全面和可靠的環境感知。
攝像頭在自動駕駛中的應用非常廣泛,其性能主要取決于分辨率、動態范圍、幀率和視場角等參數。高分辨率的攝像頭能夠捕捉更清晰的圖像,而寬動態范圍則有助于在不同光照條件下保持圖像質量。攝像頭在車道檢測、交通標志識別、行人和車輛識別等方面發揮著重要作用,但同時也容易受到光照和天氣條件的影響。
激光雷達的性能主要體現在其測距精度、分辨率、視場角和更新頻率等方面。高精度的激光雷達能夠提供精確的三維環境信息,而高分辨率則有助于識別細小的物體。激光雷達在高精度地圖構建、障礙物檢測和SLAM(同步定位與地圖構建)等領域有著不可替代的優勢,但其成本和對環境的敏感性也是需要考慮的因素。
毫米波雷達的性能主要取決于其工作頻率、分辨率和檢測范圍。77GHz的毫米波雷達因其高分辨率和精確度而更受歡迎。毫米波雷達在車輛前碰撞預警、自適應巡航控制和盲點檢測等應用中表現出色,且不受光照和天氣條件的影響。然而,毫米波雷達在物體分類和識別方面的能力有限,通常需要與其他傳感器如攝像頭或激光雷達結合使用以提供更全面的信息。
超聲波雷達在近距離探測方面具有優勢,尤其是在自動泊車系統中。其性能主要取決于工作頻率、檢測范圍和角度分辨率。超聲波雷達的成本較低,安裝簡便,但在高速行駛或長距離探測方面存在局限。在自動駕駛系統中,超聲波雷達通常與其他傳感器配合使用,以提供近距離的障礙物檢測和避障功能。
自動駕駛系統通常采用傳感器融合技術,將不同傳感器的數據進行整合,以實現更準確和可靠的環境感知。傳感器融合可以克服單一傳感器的局限性,提高系統的魯棒性和安全性。例如,攝像頭可以提供豐富的視覺信息,而激光雷達則可以提供精確的距離和形狀信息。通過融合這些數據,自動駕駛系統可以更好地理解周圍環境,做出更合理的決策。
自動駕駛傳感器的工作原理是將環境中的物理信息轉換為車輛能夠理解和處理的數字信號。不同類型的傳感器采用不同的技術來實現這一目標。
攝像頭的工作原理基于光學成像原理。光線通過鏡頭聚焦在圖像傳感器上,傳感器上的像素陣列測量光線的強度,將光學信息轉換為數字圖像數據。這些數據經過圖像處理算法分析,實現車輛周圍環境的視覺感知,包括道路、行人、交通標志等對象的識別和分類。
雷達(Radio Detection and Ranging)使用電磁波進行遠距離感知和定位。雷達系統發射電磁波,當波束遇到物體時,部分波會被反射回來。雷達接收反射信號,并測量發射和接收之間的時間延遲,從而計算出物體的距離。此外,雷達還可以通過分析反射信號的強度來估計物體的大小和形狀。
激光雷達(LiDAR)通過發射激光束并測量其反射回來的時間來探測物體的距離和形狀。激光雷達可以采用機械旋轉或固態電子掃描的方式來覆蓋周圍環境,生成高精度的三維點云圖。不同類型的激光雷達,如機械式、固態和多光束激光雷達,具有不同的工作原理和性能特點。
超聲波雷達通過發射超聲波并接收其反射回來的信號來測量與障礙物的距離。超聲波在空氣中的傳播速度是已知的,因此通過測量發射和接收之間的時間,可以計算出距離。超聲波雷達通常用于近距離探測,如自動泊車輔助系統。
隨著自動駕駛技術的發展,對傳感器的要求也在不斷提高。不同級別的自動駕駛系統對傳感器的依賴程度和性能要求各不相同。
L1級別的自動駕駛系統主要提供駕駛員輔助功能,如自動泊車或定速巡航。在這一級別,傳感器的作用相對有限,通常包括基本的攝像頭和短距離雷達,用于支持特定的輔助功能。
L2級別的自動駕駛系統能夠同時控制車輛的轉向和加速,但駕駛員仍需監控環境并隨時準備接管控制。在這一級別,傳感器系統更加復雜,通常包括多個攝像頭、中距離雷達和可能的激光雷達,以提供更全面的環境感知能力。
L3級別的自動駕駛系統在特定條件下能夠完全自主駕駛,但駕駛員需要在系統請求時接管控制。這一級別的傳感器系統需要更高的可靠性和性能,可能包括長距離雷達、高清攝像頭、激光雷達和高精度的GNSS定位系統,以支持車輛在更復雜的環境中安全行駛。
L4和L5級別的自動駕駛系統分別代表高度自動化和完全自動化的駕駛能力。在這兩個級別,傳感器系統需要達到極高的性能標準,以確保在所有環境和交通條件下都能安全運行。傳感器套件可能包括高清攝像頭、長距離和短距離雷達、高分辨率激光雷達、高精度IMU和GNSS系統,以及可能的其他傳感器,如紅外攝像頭或超聲波傳感器,以提供全面的環境感知和車輛定位能力。
自動駕駛傳感器的性能比較涉及多個方面,包括探測范圍、空間分辨率、魯棒性、物體分類能力、成本和集成度等。
激光雷達和毫米波雷達通常具有較遠的探測范圍,能夠檢測到幾十米甚至200米以上的物體。而攝像頭在測量距離方面存在局限,通常需要依賴對環境的假設來估計物體距離。立體攝像頭雖然可以測量距離,但其精度在超過80米后會顯著下降。
激光雷達因其較短的紅外激光波長,具有約0.1°的高空間分辨率,能夠進行高分辨率的3D掃描。相比之下,雷達在分辨小特征方面表現不佳,尤其是隨著距離的增加。攝像頭的空間分辨率受光學元件、像素大小和信噪比等因素影響,小物體的細節容易丟失,尤其是在低光照條件下。
雷達和激光雷達作為主動傳感器,在黑暗中表現出極好的魯棒性。激光雷達在夜間的性能甚至優于白天,因為不受環境陽光的干擾。而攝像頭作為被動傳感器,依賴環境光,夜間探測能力相對較低,盡管圖像傳感器技術有所進步,但在三種傳感器中夜間性能仍然最低。
雷達傳感器在雨、雪、霧等惡劣天氣條件下表現出色,不受這些環境因素的顯著影響。而激光雷達和攝像頭作為光學系統,容易受到惡劣天氣的影響,性能會隨著逆境程度的增加而下降。
攝像頭在物體分類方面表現出色,尤其是在人工智能技術的幫助下,能夠識別車輛、行人、交通標志等。激光雷達雖然也能進行一定程度的分類,但其對象多樣性不如攝像頭。雷達系統在物體分類方面的能力有限。
雷達系統和單目攝像頭在成本和集成度方面具有優勢,價格合理且易于集成到車輛中。立體攝像頭和激光雷達的成本較高,尤其是激光雷達,盡管近年來成本有所下降,但仍高于其他傳感器。此外,立體攝像頭可能因體積較大而難以集成到車輛中,可能會影響駕駛員的視野。
自動駕駛傳感器的融合策略是實現高效環境感知的關鍵。通過結合不同傳感器的優勢,可以提高系統的魯棒性和準確性。
數據級融合是將不同傳感器采集的原始數據在最底層進行整合。這種融合方式可以充分利用各傳感器的信息,但處理起來較為復雜,需要同步不同傳感器的數據,并解決數據格式和時間戳對齊等問題。
特征級融合是在數據經過初步處理后,提取特征并進行整合。這種融合方式可以減少計算量,提高處理速度。例如,雷達的點目標可以投影到圖像上,生成感興趣區域,然后只對該區域內的特征進行搜索和匹配。
決策級融合是在傳感器數據處理完成后,將各傳感器的決策結果進行綜合。這種融合方式簡單易行,可以快速排除不可能的情況,提高識別速度。例如,毫米波雷達與單目相機融合時,雷達的點云信息可以輔助圖像識別,提高目標檢測的準確性。
自動駕駛傳感器技術正朝著更高精度、更強魯棒性和更低成本的方向發展。隨著技術的進步,未來自動駕駛汽車的傳感器系統將更加完善和高效。
激光雷達技術正朝著固態化、小型化和低成本化發展。新型的固態激光雷達采用電子掃描技術,無需機械旋轉部件,具有更高的可靠性和耐用性。同時,隨著生產規模的擴大,激光雷達的成本也在逐漸降低,使得其在自動駕駛汽車中的應用更加廣泛。
毫米波雷達的頻段正在向更高頻率擴展,如79GHz,以提高分辨率和檢測精度。同時,雷達的算法也在不斷優化,以提高對小物體和復雜環境的識別能力。
攝像頭的像素和動態范圍在不斷提升,以適應更復雜的光照條件和更高的圖像處理需求。高動態范圍攝像頭能夠在不同光照條件下保持圖像質量,提高目標識別的準確性。
傳感器融合技術正在不斷創新,以實現更高效和準確的數據整合。通過深度學習和人工智能技術,可以更好地處理和分析來自不同傳感器的數據,提高自動駕駛系統的決策能力。
隨著自動駕駛技術的商業化,成本效益成為傳感器發展的重要考慮因素。在保證性能的同時,降低傳感器成本,實現大規模量產,是推動自動駕駛普及的關鍵。
自動駕駛傳感器需要在各種環境條件下都能穩定工作。隨著技術的發展,傳感器的抗干擾能力和環境適應性將不斷提升,以應對不同的天氣、光照和路況條件。
自動駕駛傳感器的集成與優化是實現高效環境感知的關鍵。通過精心設計的傳感器布局和先進的數據處理算法,可以提高傳感器系統的綜合性能。
傳感器的布局需要考慮車輛的幾何結構和視野覆蓋范圍。例如,激光雷達和長距離雷達可以安裝在車輛的前部和后部,以實現遠距離的障礙物檢測;而短程雷達和超聲波傳感器則可以安裝在車輛的側面和角落,以提供近距離的避障能力。此外,攝像頭可以安裝在車輛的前后左右,以實現全方位的視覺覆蓋。
傳感器數據的處理和融合是自動駕駛系統中的關鍵技術。通過先進的算法,可以將不同傳感器的數據進行整合,以實現更準確和魯棒的環境感知。例如,SLAM算法可以結合傳感器數據和地圖信息,實現車輛的精確定位和地圖構建;而傳感器融合算法則可以處理來自多個傳感器的數據,提供更全面的環境信息。
傳感器的性能優化包括提高分辨率、擴大檢測范圍、增強魯棒性等方面。例如,通過提高攝像頭的像素和動態范圍,可以在不同光照條件下保持圖像質量;通過優化雷達的頻率和波形,可以提高對小物體和復雜環境的識別能力;通過改進激光雷達的掃描技術和接收器,可以提高測量精度和速度。
在自動駕駛傳感器的設計中,需要在成本和可靠性之間找到平衡。一方面,傳感器的成本需要控制在合理范圍內,以實現大規模應用;另一方面,傳感器的性能和可靠性也需要滿足自動駕駛的要求。通過技術創新和規模生產,可以降低傳感器的成本,同時保持其性能和可靠性。
自動駕駛傳感器的軟件和硬件需要緊密協同工作。傳感器的硬件設計需要考慮數據的采集和傳輸效率,而軟件算法則需要充分利用硬件的性能,實現高效的數據處理和融合。通過軟硬件的深度集成,可以提高傳感器系統的綜合性能和響應速度。
Waymo的新一代自動駕駛系統Driver在傳感器技術方面進行了顯著的改進和創新,以提高系統的可靠性和性能。
新版本的Driver系統能夠從更遠的距離檢測障礙物,這得益于其先進的傳感器套件,包括攝像頭、激光雷達和雷達模塊。這些傳感器的組合使用,使得系統能夠在各種環境條件下,如白天和夜間,都能準確識別和跟蹤周圍的物體。
Driver系統的計算能力得到了提升,同時環境數據收集的分辨率也有所增強。這意味著系統能夠處理更大量的數據,并以更高的精度感知周圍環境,從而做出更快速和準確的決策。
Waymo對Driver系統的傳感器套件進行了強化,以抵御冬季惡劣天氣,確保在冰點溫度下也能可靠運行。這包括對激光雷達、攝像頭和雷達模塊的改進,以提高它們在低溫和惡劣天氣條件下的性能。
Waymo通過減少傳感器數量,實現了成本的降低,但并未犧牲性能。這表明Waymo在傳感器設計和集成方面取得了技術突破,能夠在保持高效性能的同時,降低系統的成本。
Waymo計劃將新一代Driver系統應用于基于極氪智能科技控股有限公司的電動汽車的自動駕駛出租車車隊。這將為乘客提供更加舒適和易接近的內飾體驗,同時提高車隊的運營效率和安全性。
Waymo近期從母公司Alphabet獲得了50億美元的投資,部分資金將用于擴大基于最新一代Driver系統的自動駕駛出租車車隊。目前,Waymo的叫車服務已在舊金山、洛杉磯和鳳凰城成功運營,完成了超過200萬次行程,顯示出其自動駕駛技術的成熟度和市場潛力。
自動駕駛傳感器技術的發展是多方面的,包括傳感器類型的多樣化、性能的提升、成本的降低以及集成度的提高。以下是一些與自動駕駛傳感器相關的補充信息:
傳感器類型:除了上述提到的車載攝像頭、毫米波雷達、激光雷達、超聲波雷達、GNSS和IMU等,還有其他類型的傳感器,如紅外攝像頭、光學傳感器等,它們在特定的應用場景下也能發揮重要作用。
傳感器性能:傳感器的性能不僅取決于其硬件設計,還受到軟件算法的影響。例如,圖像處理算法可以提高攝像頭的識別能力,而信號處理算法可以提高雷達的分辨率和抗干擾能力。
傳感器成本:隨著技術的發展和生產規模的擴大,自動駕駛傳感器的成本正在逐漸降低。例如,激光雷達的價格已經從早期的數萬美元降低到現在的幾千美元,使得其在自動駕駛汽車中的應用更加可行。
傳感器集成:傳感器的集成不僅要考慮其在車輛上的布局,還要考慮其與車輛控制系統的接口。傳感器數據需要與車輛的決策和執行系統緊密協同,以實現高效的自動駕駛。
傳感器標準與法規:隨著自動駕駛技術的發展,相關的標準和法規也在不斷完善。例如,對于傳感器的性能要求、測試方法和安全標準,都有相應的規定和指導。
傳感器研發:各大汽車廠商和科技公司都在積極研發新的傳感器技術,以提高自動駕駛系統的性能和可靠性。例如,Waymo、特斯拉、百度等公司都在進行相關的研究和開發工作。
傳感器市場:自動駕駛傳感器市場正在快速增長,預計未來幾年將保持較高的增長速度。隨著自動駕駛技術的普及和商業化,傳感器的需求將進一步提升,推動市場的擴大。
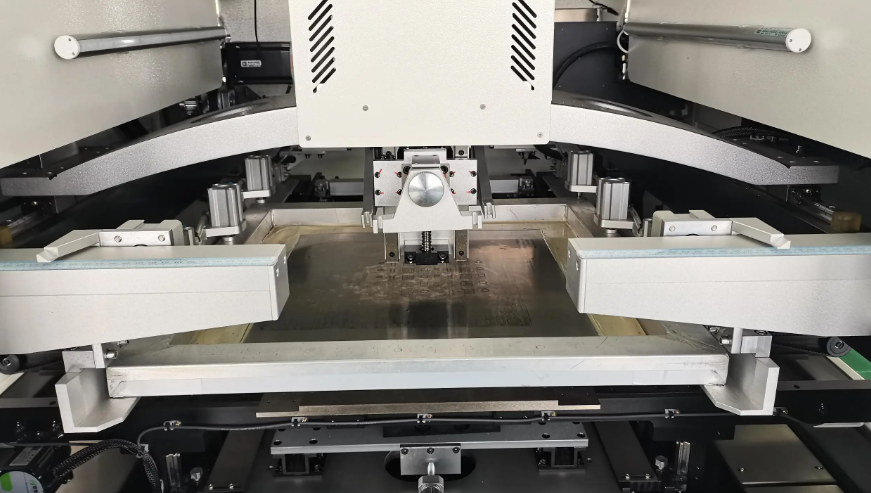
傳感器芯片封裝清洗:
合明科技研發的水基清洗劑配合合適的清洗工藝能為芯片封裝前提供潔凈的界面條件。
水基清洗的工藝和設備配置選擇對清洗精密器件尤其重要,一旦選定,就會作為一個長期的使用和運行方式。水基清洗劑必須滿足清洗、漂洗、干燥的全工藝流程。
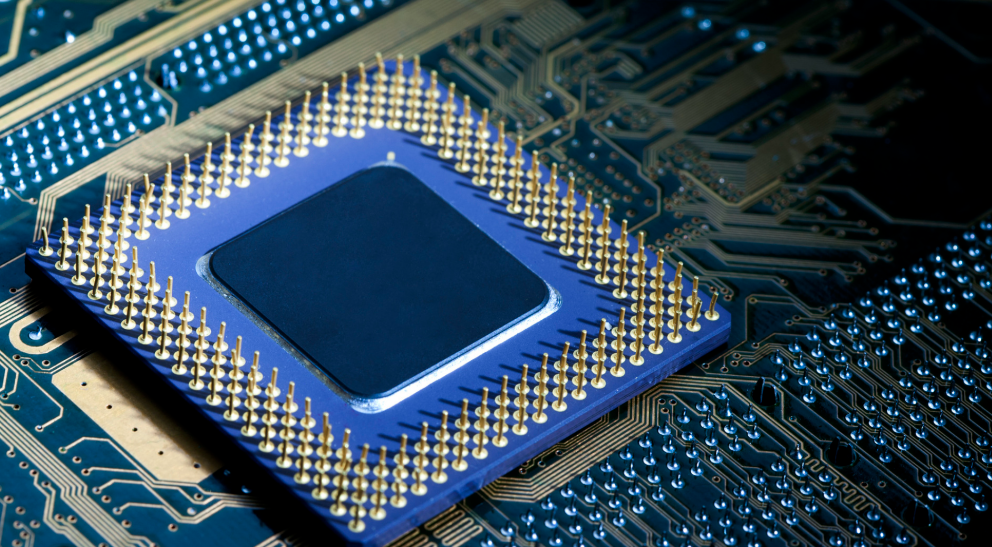
污染物有多種,可歸納為離子型和非離子型兩大類。離子型污染物接觸到環境中的濕氣,通電后發生電化學遷移,形成樹枝狀結構體,造成低電阻通路,破壞了電路板功能。非離子型污染物可穿透PC B 的絕緣層,在PCB板表層下生長枝晶。除了離子型和非離子型污染物,還有粒狀污染物,例如焊料球、焊料槽內的浮點、灰塵、塵埃等,這些污染物會導致焊點質量降低、焊接時焊點拉尖、產生氣孔、短路等等多種不良現象。
這么多污染物,到底哪些才是最備受關注的呢?助焊劑或錫膏普遍應用于回流焊和波峰焊工藝中,它們主要由溶劑、潤濕劑、樹脂、緩蝕劑和活化劑等多種成分,焊后必然存在熱改性生成物,這些物質在所有污染物中的占據主導,從產品失效情況來而言,焊后殘余物是影響產品質量最主要的影響因素,離子型殘留物易引起電遷移使絕緣電阻下降,松香樹脂殘留物易吸附灰塵或雜質引發接觸電阻增大,嚴重者導致開路失效,因此焊后必須進行嚴格的清洗,才能保障電路板的質量。
合明科技運用自身原創的產品技術,滿足芯片封裝工藝制程清洗的高難度技術要求,打破國外廠商在行業中的壟斷地位,為芯片封裝材料全面國產自主提供強有力的支持。
推薦使用合明科技水基清洗劑產品。
,我們可以看到自動駕駛傳感器技術的發展是一個多元化、綜合性的過程,涉及傳感器設計、性能提升、成本控制、系統集成、標準制定和市場發展等多個方面。隨著技術的不斷進步和市場的成熟,自動駕駛傳感器將更加完善,為實現安全、高效、可靠的自動駕駛提供堅實的基礎。
![[x]](/template/default/picture/closeimgfz1.svg)





![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](/template/default/image/zixuniconim1.png)
![[x]](/template/default/image/closeicon1.png)

![[圖標]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)